Red Black Tree (01)
1 BST
BST (Binary Search Tree) 二叉搜索树, 在key 恰好有序的时候,会退化成链表。
Conclusion
- BST 的查询复杂度取决于树的高度, 树的高度即最大比较次数。
- 一棵具有 N 个 node 的 BST 树高(height)取值范围为:
logN ≤ height ≤ N
因此,BST越平衡,在树中查找的时间就越短,连带地插入,删除也会变得效率更高。
红黑树的特征
红黑树(RBT)是节点涂了「颜色」的二分搜索树(BST),借助颜色控制,能够保证在 RBT 中,最长路径(path)不会超过最短路径的2倍(若最短的路径是5,最长的路径至多只能是10),如此,RBT便能够近似地视为平衡,如下图:
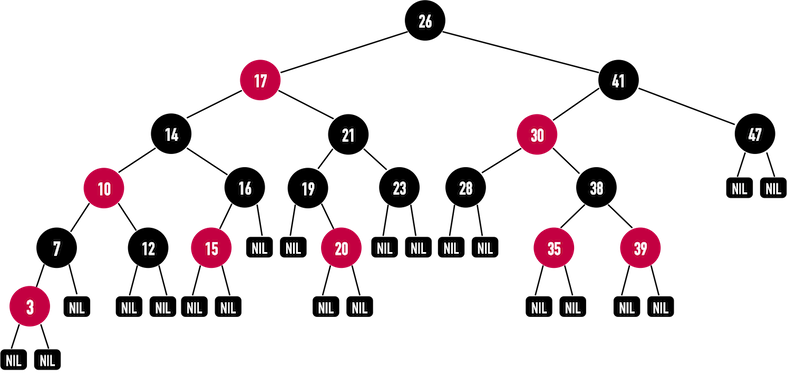
上图:最短的path为3(最右路径:26-41-47),其余路径最长只能是6(最左路径:26-17-14-10-7-3)。若遮住NIL和颜色,此即为BST。
有原本在BST中指向NULL的指针,在RBT中,全部指向了NIL。
什么是NIL?NIL是永远为黑色,并且实际占有内存的节点,因为占有内存,因此能够以 node->color 的方式获得某个节点的颜色(若使用NULL则没有办法),这样的设计将在后续介绍如何于RBT中Insert(新增资料)与Delete(删除资料)时派上用场。
接下来看RBT的五项特征:
1 RBT 中的每一个节点不是黑色就是红色。
2 root 一定是黑色。
3 每一个叶子节点leaf node(也就是NIL)一定是黑色。
4 如果某个 node 是红色,那么其两个 child 必定是黑色,不能有两个红色 node 相连,如上图中的node(17)、node(30)。
若某个 node 为黑色,其 child 的颜色没有限制,如上图中的 node(38)、node(26)、node(21)。
5 站在任何一个 node 上,所有从该 node 走到其任意 descendant leaf 的path上的黑色 node 数必定相同。
- 如上图,站在node(14)上,所有从node(14)走向其descendant leaves(也就是NIL)的路径上之黑色node数必为3:
- path1:14(b)-10(r)-7(b)-3(r)-NIL(b);
- path2:14(b)-10(r)-7(b)-NIL(b);
- path3:14(b)-10(r)-12(b)-NIL(b);
- path4:14(b)-16(b)-15(r)-NIL(b);
- path5:14(b)-16(b)-NIL(b);
其中,第 4 点和 第 5 点比较难理解:
第4点:红色节点的孩子只能为黑色节点,黑色节点的孩子则没有这个约束(但是有第5点约束)。
第5点:站在任何一个节点上,从该 node 到所有叶子节点路径上的黑色节点数 必定相同。
程序编码
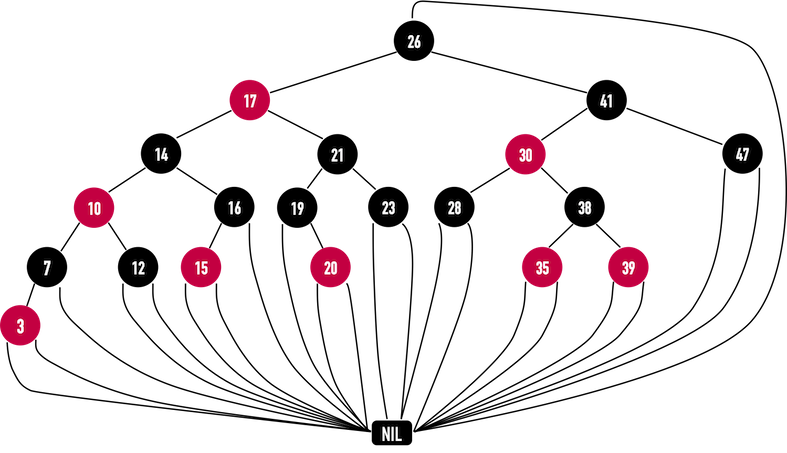
实际的程序实现上,会把所有NIL视为同一个NIL,并把根的父母指向NIL,以节省存储空间。
class TreeNode与class RBT之资料成员(数据成员)程序范例如下:
|
|
(为了避开某些IDE将NIL设置成保留关键字(保留关键字,例如template,while,struct等等),因此使用neel。)
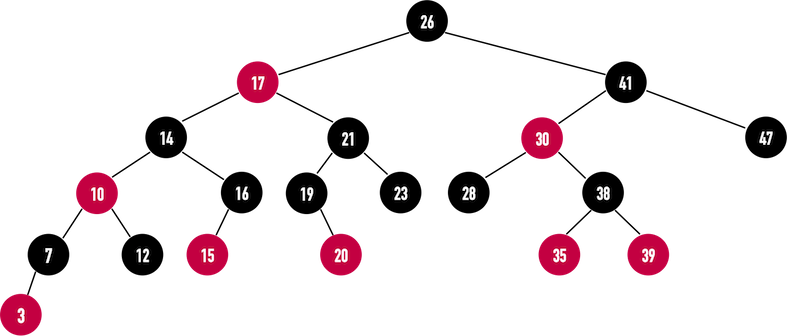
为求画面简洁,往后的篇幅里将把RBT示意图中的NIL隐藏起来,只显示RBT中的内部节点,就像下图,不过心里要记得,RBT无时无刻都被NIL充满着。
以上便是RBT之初探,最重要的事实:就时间复杂度而言,RBT能够被视为平衡的BST,所有操作皆能在时间复杂度为O(logN)内完成。
在接下来,将依序介绍Rotation,Insert与Delete。
Problem
为什么map 不使用 avl-tree, 而使用rb-tree?
avl-tree 是高度平衡的 BST, 查询效率为O(logN), avl-tree 所有节点的左右子树高度差不超过1。 当有大量插入(or 删除)需求的时候,为了维持高度平衡,需要大量节点旋转调整,成本比较高。
在map/set等内核数据结构中,大量使用的是rb-tree, rb-tree 查询复杂度也是 O(logN)。 rb-tree的平衡性要比 avl-tree 差一些,但是这也带来了好处:当有大量插入(or 删除)需求的时候,节点调整的代价相对较低。 所以这也是一种 trade-off。